Robotics Studio
The only objectives were to design and build a bipedal robot capable of walking with decent speed on its own. It was allowed minimal support for balance from an outside source during the walk.
My partner and I decided to recreate the soot creatures from Spirited Away in our design. We wanted to mainly focus on the legs, but planned out arms in case there was time to implement them (there was not)

Initial Sketches

Torque and power analyses were performed to estimate the robot’s capabilities and how feasible the design was.
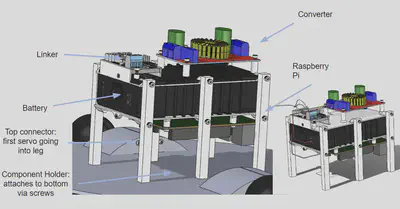
Preliminary CAD



This CAD was rendered with perspective and photorealism. Also rendered in context.
Detailed CAD
Refining the previous CAD to include proper attachment methods and more finalized components. we ended up having the downsize and simplify the feet to bring down print times.


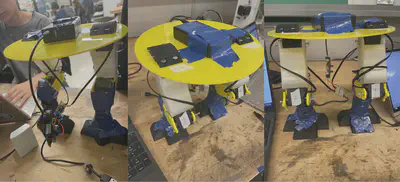
Working Legs
After receiving the 3D prints of our leg design, we assembled, started testing, and noted down any changes needed to the design.

Full Robot
At this point in time, we didn’t have all the proper parts and so had to tape some things to keep them together, but we were able to get two-legged motion going with the robot shuffling forward unassisted.
Final Performance
