Splint Math
A main issue with finger splints is migration. Any movement of the splint on the finger changes how the finger is pulled and reduces proper functionality. This is a problem that plagues many hand orthoses. In order to better understand what is happening, we have done a moment analysis on the finger-splint system to generate plots of its behavior. Once happy with the graphs’ representation of real phenomena, we can use his data to help inform splint design decisions.
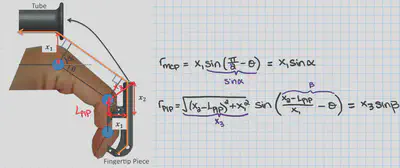
We started off with intial representations of the moment arms for the two main joints of the finger: the MCP and PIP. The key was to determine the accuracy of these equations and where they came from before moving forward.
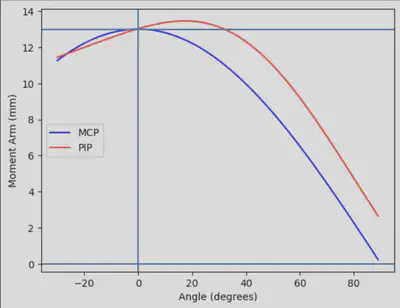
The MCP joint was relatively accurate but the PIP was more complicated and we are in the process off formulating a better representation for its motion. The relationship between the two moment arms is showed in the graph below; currently working on coalescing the current equations with the modifications to them needed to get this shape.
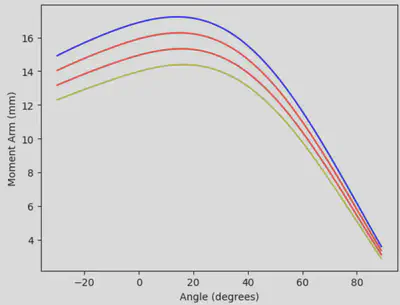
We are also looking at how the moment arms are affected by the dimensions of the splints themselves. Below is a graph showing what happens if $x_1$ is varied for the PIP joint.
Continuing work is being done to determine the right equations and move away from the ideal case to more real world situations.