MyHandSCI
Initial Motivations and Goals
When designing this device, we talked to physicians about what is particularly challenging for individuals who have limited hand movement due to SCI. The top three mentioned were:
- Maintaining a hand position to perform a task
- Maintaining a stronger grip
- Writing with a pen/pencil
The overall idea is that patients wants to be assisted with grasping different types of everyday items. Not only for being able to grab the item, but also for maintaining a strong grip and position as needed to use the item. This is what we focused on.
Iteration 1

Iteration 2

Iteration 3

Iteration 4



Iteration 5
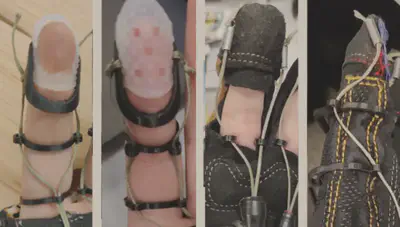
Several combinations of rings were tried to find the optimal one for pulling. This involved changing where on the rings the rope was routed through and observing how that changed actuation. Here are some examples:
Iteration 6

Iteration 7
Final Iteration
Final Patient Results
Once we had a prototype we were happy with, we had a patient session to test out its true capabilities and get direct feedback.
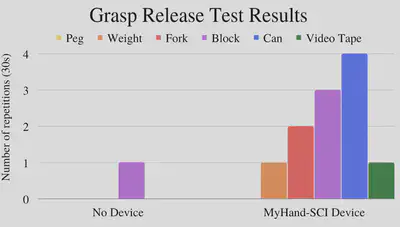
Our device prototype was tested on one individual with C6 tetraplegia (affected wrist extension and paralysis in hand) using the Grasp and Release Test (GRT). The GRT assesses the ability of an individual with C5 or C6 tetraplegia to manipulate a set of objects varying in size and weight including: a peg, a weight, a fork, a block, a can, and a videotape. The participant tries to grasp and place the objects as many times as possible within a 30-second period, both with and without an assistive device, to measure how effective the device is. The objects of the GRT present two types of grasps commonly, a pinch grasp and a power grasp, so it is an appropriate proxy for common tasks an individual may need to perform in the world.

The orthosis was able to improve the participants’s GRT score from a 1 (⅙ objects successfully manipulated) to 11 (⅚ objects manipulated multiple times). This shows great promise in the device’s ability to help those affected by SCI regain some hand function.